Adjacency matrix
From Wikipedia, the free encyclopedia
In mathematics and computer science, the adjacency matrix of a finite directed or undirected graph G on n vertices is the n × n matrix where the nondiagonal entry aij is the number of edges from vertex i to vertex j, and the diagonal entry aii is either twice the number of loops at vertex i or just the number of loops (usages differ, depending on the mathematical needs; this article follows the former convention for undirected graphs, though directed graphs always follow the latter). There exists a unique adjacency matrix for each graph (up to permuting rows and columns), and it is not the adjacency matrix of any other graph. In the special case of a finite simple graph, the adjacency matrix is a (0,1)-matrix with zeros on its diagonal. If the graph is undirected, the adjacency matrix is symmetric.
Another matrix representation for a graph is the incidence matrix.
The relationship between a graph and the eigenvalues and eigenvectors of its adjacency matrix is studied in spectral graph theory.
Contents |
[edit] Examples
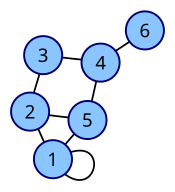
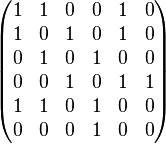
- Here is an example of a labeled graph and its adjacency matrix. The convention followed here is that an adjacent edge counts 1 in the matrix for an undirected graph. (X,Y coordinates are 1-6)
| Labeled graph | Adjacency matrix |
|---|---|
 |
 |
- The adjacency matrix of a complete graph is all 1's except for 0's on the diagonal.
- The adjacency matrix of an empty graph is all 0's.
[edit] Adjacency matrix of a bipartite graph
The adjacency matrix A of a bipartite graph whose parts have r and s vertices has the form

where B is an r × s matrix and O is an all-zero matrix. Clearly, the matrix B uniquely represents the bipartite graphs, and it is commonly called its biadjacency matrix.
Formally, let G = (U, V, E) be a bipartite graph or digraph with parts U = u1,...,ur and V = v1,...,vs. An r x s 0-1 matrix B is called the biadjacency matrix if Bi,j = 1 iff  .
.
If G is a bipartite multigraph or weighted graph then the elements Bi,j are taken to be the number of edges between or the weight of (ui,vj) respectively.
[edit] Properties
The adjacency matrix of an undirected simple graph is symmetric, and therefore has a complete set of real eigenvalues and an orthogonal eigenvector basis. The set of eigenvalues of a graph is the spectrum of the graph.
Suppose two directed or undirected graphs G1 and G2 with adjacency matrices A1 and A2 are given. G1 and G2 are isomorphic if and only if there exists a permutation matrix P such that
- PA1P − 1 = A2.
In particular, A1 and A2 are similar and therefore have the same minimal polynomial, characteristic polynomial, eigenvalues, determinant and trace. These can therefore serve as isomorphism invariants of graphs. However, two graphs may possess the same set of eigenvalues but not be isomorphic (one cannot 'hear' the shape of a graph).
If A is the adjacency matrix of the directed or undirected graph G, then the matrix An (i.e., the matrix product of n copies of A) has an interesting interpretation: the entry in row i and column j gives the number of (directed or undirected) walks of length n from vertex i to vertex j.
The main diagonal of every adjacency matrix corresponding to a graph without loops has all zero entries.
For  -regular graphs, d is also an eigenvalue of A, for the vector
-regular graphs, d is also an eigenvalue of A, for the vector  , and G is connected iff the multiplicity of d is 1. It can be shown that − d is also an eigenvalue of A if G is connected bipartite graph. The above are results of Perron–Frobenius theorem.
, and G is connected iff the multiplicity of d is 1. It can be shown that − d is also an eigenvalue of A if G is connected bipartite graph. The above are results of Perron–Frobenius theorem.
This statement is false: The matrix I − A (where I denotes the n × n identity matrix) is invertible if and only if there are no directed cycles in the graph G. In this case, the inverse (I − A) − 1 has the following interpretation: the entry in row i and column j gives the number of directed paths from vertex i to vertex j (which is always finite if there are no directed cycles). This can be understood using the geometric series for matrices: (I − A) − 1 = I + A + A2 + A3 + ... corresponding to the fact that the number of paths from i to j equals the number of paths of length 0 plus the number of paths of length 1 plus the number of paths of length 2, etc. Consider the following counter-example:

[edit] Variations
The Seidel adjacency matrix or (0,−1,1)-adjacency matrix of a simple graph has zero on the diagonal and entry aij = − 1 if ij is an edge and +1 if it is not. This matrix is used in studying strongly regular graphs and two-graphs.
A distance matrix is like a higher-level adjacency matrix. Instead of only providing information about whether or not two vertices are connected, also tells the distances between them. This assumes the length of every edge is 1. A variation is where the length of an edge is not necessarily 1.
[edit] Data structures
When used as a data structure, the main competitor for the adjacency matrix is the adjacency list. Because each entry in the adjacency matrix requires only one bit, they can be represented in a very compact way, occupying only n2 / 8 bytes of contiguous space, where n is the number of vertices. Besides just avoiding wasted space, this compactness encourages locality of reference.
On the other hand, for a sparse graph, adjacency lists win out, because they do not use any space to represent edges which are not present. Using a naive array implementation on a 32-bit computer, an adjacency list for an undirected graph requires about 8e bytes of storage, where e is the number of edges.
Noting that a simple graph can have at most n2 edges, allowing loops, we can let d = e / n2 denote the density of the graph. Then, 8e > n2 / 8, or the adjacency list representation occupies more space, precisely when d > 1 / 64. Thus a graph must be sparse indeed to justify an adjacency list representation.
Besides the space tradeoff, the different data structures also facilitate different operations. Finding all vertices adjacent to a given vertex in an adjacency list is as simple as reading the list. With an adjacency matrix, an entire row must instead be scanned, which takes O(n) time. Whether there is an edge between two given vertices can be determined at once with an adjacency matrix, while requiring time proportional to the minimum degree of the two vertices with the adjacency list.
[edit] References
- Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest, and Clifford Stein (2001), Introduction to Algorithms, second edition. MIT Press and McGraw-Hill. ISBN 0-262-03293-7. Section 22.1: Representations of graphs, pp. 527–531.
- Chris Godsil and Gordon Royle (2001), Algebraic Graph Theory. New York: Springer-Verlag. ISBN 0-387-95241-1
[edit] External links
- Fluffschack — an educational Java web start game demonstrating the relationship between adjacency matrices and graphs.

