Pulse-width modulation
From Wikipedia, the free encyclopedia
|
|
This article includes a list of references or external links, but its sources remain unclear because it lacks inline citations. Please improve this article by introducing more precise citations where appropriate. |

Pulse-width modulation (PWM) of a signal or power source involves the modulation of its duty cycle, to either convey information over a communications channel or control the amount of power sent to a load.
Contents |
[edit] Principle
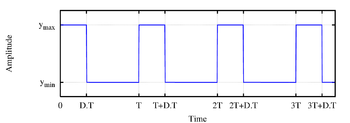
Pulse-width modulation uses a square wave whose pulse width is modulated resulting in the variation of the average value of the waveform. If we consider a square waveform f(t) with a low value ymin, a high value ymax and a duty cycle D (see figure 1), the average value of the waveform is given by:
As f(t) is a square wave, its value is ymax for  and ymin for
and ymin for  . The above expression then becomes:
. The above expression then becomes:
This latter expression can be fairly simplified in many cases where ymin = 0 as  . From this, it is obvious that the average value of the signal (
. From this, it is obvious that the average value of the signal ( ) is directly dependent on the duty cycle D.
) is directly dependent on the duty cycle D.

The simplest way to generate a PWM signal is the intersective method, which requires only a sawtooth or a triangle waveform (easily generated using a simple oscillator) and a comparator. When the value of the reference signal (the green sine wave in figure 2) is more than the modulation waveform (blue), the PWM signal (magenta) is in the high state, otherwise it is in the low state.
[edit] Delta
In the use of delta modulation for PWM control, the output signal is compared with limits, which correspond to a reference signal offset by a constant. Every time the output signal reaches one of the limits, the PWM signal changes state.

[edit] Delta-sigma
In delta-sigma modulation as a PWM control method, the output signal is subtracted from a reference signal to form an error signal. This error is integrated, and when the integral of the error exceeds the limits, the output changes state.

[edit] Space vector modulation
Space vector modulation is a PWM control algorithm for multi-phase AC generation, in which the reference signal is sampled regularly; after each sample, non-zero active switching vectors adjacent to the reference vector and one or more of the zero switching vectors are selected for the appropriate fraction of the sampling period in order to synthesize the reference signal.
[edit] Digital
Many digital circuits can generate PWM signals (e.g many microcontrollers have PWM outputs). They normally use a counter that increments periodically (it is connected directly or indirectly to the clock of the circuit) and is reset at the end of every period of the PWM. When the counter value is more than the reference value, the PWM output changes state from high to low (or low to high).[1]
The incremented and periodically reset counter is the discrete version of the intersecting method's sawtooth. The analog comparator of the intersecting method becomes a simple integer comparison between the current counter value and the digital (possibly digitized) reference value. The duty cycle can only be varied in discrete steps, as a function of the counter resolution.
[edit] Types

Three types of pulse-width modulation (PWM) are possible:
- The pulse center may be fixed in the center of the time window and both edges of the pulse moved to compress or expand the width.
- The lead edge can be held at the lead edge of the window and the tail edge modulated.
- The tail edge can be fixed and the lead edge modulated.
[edit] Spectrum
The resulting spectra (of the three cases) are similar, and each contains a dc component, a base sideband containing the modulating signal and phase modulated carriers at each harmonic of the frequency of the pulse. The amplitudes of the harmonic groups are restricted by a sinx / x envelope (sinc function) and extend to infinity.
[edit] Applications
[edit] Telecommunications
In telecommunications, the widths of the pulses correspond to specific data values encoded at one end and decoded at the other.
Pulses of various lengths (the information itself) will be sent at regular intervals (the carrier frequency of the modulation).
_ _ _ _ _ _ _ _
| | | | | | | | | | | | | | | |
Clock | | | | | | | | | | | | | | | |
__| |____| |____| |____| |____| |____| |____| |____| |____
Data 0 1 2 4 0 4 1 0
The inclusion of a clock signal is not necessary, as the leading edge of the data signal can be used as the clock if a small offset is added to the data value in order to avoid a data value with a zero length pulse.
[edit] Power delivery
PWM can be used to reduce the total amount of power delivered to a load without losses normally incurred when a power source is limited by resistive means. This is because the average power delivered is proportional to the modulation duty cycle. With a sufficiently high modulation rate, passive electronic filters can be used to smooth the pulse train and recover an average analog waveform.
High frequency PWM power control systems are easily realisable with semiconductor switches. The discrete on/off states of the modulation are used to control the state of the switch(es) which correspondingly control the voltage across or current through the load. The major advantage of this system is the switches are either off and not conducting any current, or on and have (ideally) no voltage drop across them. The product of the current and the voltage at any given time defines the power dissipated by the switch, thus (ideally) no power is dissipated by the switch. Realistically, semiconductor switches such as MOSFETs or BJTs are non-ideal switches, but high efficiency controllers can still be built.
PWM is also often used to control the supply of electrical power to another device such as in speed control of electric motors, volume control of Class D audio amplifiers or brightness control of light sources and many other power electronics applications. For example, light dimmers for home use employ a specific type of PWM control. Home use light dimmers typically include electronic circuitry which suppresses current flow during defined portions of each cycle of the AC line voltage. Adjusting the brightness of light emitted by a light source is then merely a matter of setting at what voltage (or phase) in the AC cycle the dimmer begins to provide electrical current to the light source (e.g. by using an electronic switch such as a triac). In this case the PWM duty cycle is defined by the frequency of the AC line voltage (50 Hz or 60 Hz depending on the country). These rather simple types of dimmers can be effectively used with inert (or relatively slow reacting) light sources such as incandescent lamps, for example, for which the additional modulation in supplied electrical energy which is caused by the dimmer causes only negligible additional fluctuations in the emitted light. Some other types of light sources such as light-emitting diodes (LEDs), however, turn on and off extremely rapidly and would perceivably flicker if supplied with low frequency drive voltages. Perceivable flicker effects from such rapid response light sources can be reduced by increasing the PWM frequency. If the light fluctuations are sufficiently rapid, the human visual system can no longer resolve them and the eye perceives the time average intensity without flicker (see flicker fusion threshold).
[edit] Voltage regulation
PWM is also used in efficient voltage regulators. By switching voltage to the load with the appropriate duty cycle, the output will approximate a voltage at the desired level. The switching noise is usually filtered with an inductor and a capacitor.
One method measures the output voltage. When it is lower than the desired voltage, it turns on the switch. When the output voltage is above the desired voltage, it turns off the switch.
Variable-speed fan controllers for computers usually use PWM, as it is far more efficient when compared to a potentiometer.
[edit] Audio effects and amplification
PWM is sometimes used in sound synthesis, in particular subtractive synthesis, as it gives a sound effect similar to chorus or slightly detuned oscillators played together. (In fact, PWM is equivalent to the difference of two sawtooth waves. [1]) The ratio between the high and low level is typically modulated with a low frequency oscillator, or LFO.
A new class of audio amplifiers based on the PWM principle is becoming popular. Called "Class-D amplifiers", these amplifiers produce a PWM equivalent of the analog input signal which is fed to the loudspeaker via a suitable filter network to block the carrier and recover the original audio. These amplifiers are characterized by very good efficiency figures (≥ 90%) and compact size/light weight for large power outputs.
Historically, a crude form of PWM has been used to play back PCM digital sound on the PC speaker, which is only capable of outputting two sound levels. By carefully timing the duration of the pulses, and by relying on the speaker's physical filtering properties (limited frequency response, self-inductance, etc.) it was possible to obtain an approximate playback of mono PCM samples, although at a very low quality, and with greatly varying results between implementations.
In more recent times, the Direct Stream Digital sound encoding method was introduced, which uses a generalized form of pulse-width modulation called pulse density modulation, at a high enough sampling rate (typically in the order of MHz) to cover the whole acoustic frequencies range with sufficient fidelity. This method is used in the SACD format, and reproduction of the encoded audio signal is essentially similar to the method used in class-D amplifiers.
[edit] See also
- Pulse-code modulation
- Pulse-amplitude modulation
- Pulse-density modulation
- Delta-sigma modulation
- Pulse-position modulation
- Radio control
- Switching amplifier
- Sliding mode control – A related topic that produces smooth behavior by way of discontinuous switching in systems.
- Space vector modulation
[edit] External links
| Wikimedia Commons has media related to: Pulse width modulation |
- PWM Tutorial Video in HD Includes examples of LED dimming and motor speed control
- An Introduction to Delta Sigma Converters
[edit] Applications
- A PWM circuit using 555 timer ICs
- PWM circuit and DC motor
- Some simple circuits to generate PWM signals
- Nick's Idea Page :: PWM Modulator includes the design and discussion of a PWM Modulator circuit used for the control of Servo Motors.
- SAE J1850 BUS Information – PWM and VPW automotive communication bus description
- Fix for 4-pin PWM Fans not running at full speed on legacy motherboards with 3-pin CPU fan headers
- PWM with H-Bridge controller

