Artificial neural network
From Wikipedia, the free encyclopedia
|
|
It has been suggested that Neural network be merged into this article or section. (Discuss) |
|
|
This article needs additional citations for verification. Please help improve this article by adding reliable references (ideally, using inline citations). Unsourced material may be challenged and removed. (March 2009) |
An artificial neural network (ANN), often just called a "neural network" (NN), is a mathematical model or computational model based on biological neural networks. It consists of an interconnected group of artificial neurons and processes information using a connectionist approach to computation. In most cases an ANN is an adaptive system that changes its structure based on external or internal information that flows through the network during the learning phase.
In more practical terms neural networks are non-linear statistical data modeling tools. They can be used to model complex relationships between inputs and outputs or to find patterns in data.
[edit] Background

There is no precise agreed-upon definition among researchers as to what a neural network is, but most would agree that it involves a network of simple processing elements (neurons), which can exhibit complex global behavior, determined by the connections between the processing elements and element parameters. The original inspiration for the technique was from examination of the central nervous system and the neurons (and their axons, dendrites and synapses) which constitute one of its most significant information processing elements (see Neuroscience). In a neural network model, simple nodes (called variously "neurons", "neurodes", "PEs" ("processing elements") or "units") are connected together to form a network of nodes — hence the term "neural network." While a neural network does not have to be adaptive per se, its practical use comes with algorithms designed to alter the strength (weights) of the connections in the network to produce a desired signal flow.
These networks are also similar to the biological neural networks in the sense that functions are performed collectively and in parallel by the units, rather than there being a clear delineation of subtasks to which various units are assigned (see also connectionism). Currently, the term Artificial Neural Network (ANN) tends to refer mostly to neural network models employed in statistics, cognitive psychology and artificial intelligence. Neural network models designed with emulation of the central nervous system (CNS) in mind are a subject of theoretical neuroscience (computational neuroscience).
In modern software implementations of artificial neural networks the approach inspired by biology has more or less been abandoned for a more practical approach based on statistics and signal processing. In some of these systems neural networks, or parts of neural networks (such as artificial neurons) are used as components in larger systems that combine both adaptive and non-adaptive elements. While the more general approach of such adaptive systems is more suitable for real-world problem solving, it has far less to do with the traditional artificial intelligence connectionist models. What they do, however, have in common is the principle of non-linear, distributed, parallel and local processing and adaptation.
[edit] Models
Neural network models in artificial intelligence are usually referred to as artificial neural networks (ANNs); these are essentially simple mathematical models defining a function  . Each type of ANN model corresponds to a class of such functions.
. Each type of ANN model corresponds to a class of such functions.
[edit] The network in artificial neural network
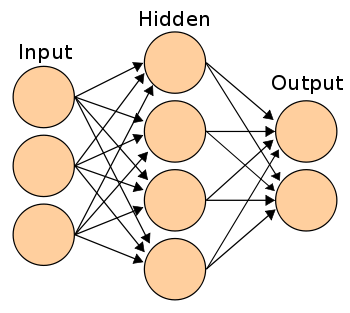
The word network in the term 'artificial neural network' arises because the function f(x) is defined as a composition of other functions gi(x), which can further be defined as a composition of other functions. This can be conveniently represented as a network structure, with arrows depicting the dependencies between variables. A widely used type of composition is the nonlinear weighted sum, where  , where K is some predefined function, such as the hyperbolic tangent. It will be convenient for the following to refer to a collection of functions gi as simply a vector
, where K is some predefined function, such as the hyperbolic tangent. It will be convenient for the following to refer to a collection of functions gi as simply a vector  .
.

This figure depicts such a decomposition of f, with dependencies between variables indicated by arrows. These can be interpreted in two ways.
The first view is the functional view: the input x is transformed into a 3-dimensional vector h, which is then transformed into a 2-dimensional vector g, which is finally transformed into f. This view is most commonly encountered in the context of optimization.
The second view is the probabilistic view: the random variable F = f(G) depends upon the random variable G = g(H), which depends upon H = h(X), which depends upon the random variable X. This view is most commonly encountered in the context of graphical models.
The two views are largely equivalent. In either case, for this particular network architecture, the components of individual layers are independent of each other (e.g., the components of g are independent of each other given their input h). This naturally enables a degree of parallelism in the implementation.

Networks such as the previous one are commonly called feedforward, because their graph is a directed acyclic graph. Networks with cycles are commonly called recurrent. Such networks are commonly depicted in the manner shown at the top of the figure, where f is shown as being dependent upon itself. However, there is an implied temporal dependence which is not shown.
[edit] Learning
However interesting such functions may be in themselves, what has attracted the most interest in neural networks is the possibility of learning, which in practice means the following:
Given a specific task to solve, and a class of functions F, learning means using a set of observations, in order to find  which solves the task in an optimal sense.
which solves the task in an optimal sense.
This entails defining a cost function  such that, for the optimal solution f * ,
such that, for the optimal solution f * , 
 (no solution has a cost less than the cost of the optimal solution).
(no solution has a cost less than the cost of the optimal solution).
The cost function C is an important concept in learning, as it is a measure of how far away we are from an optimal solution to the problem that we want to solve. Learning algorithms search through the solution space in order to find a function that has the smallest possible cost.
For applications where the solution is dependent on some data, the cost must necessarily be a function of the observations, otherwise we would not be modelling anything related to the data. It is frequently defined as a statistic to which only approximations can be made. As a simple example consider the problem of finding the model f which minimizes ![C=E\left[(f(x) - y)^2\right]](http://upload.wikimedia.org/math/9/5/4/9541ffdc354fd32d4b65ca89c1396652.png) , for data pairs (x,y) drawn from some distribution
, for data pairs (x,y) drawn from some distribution  . In practical situations we would only have N samples from and thus, for the above example, we would only minimize
. In practical situations we would only have N samples from and thus, for the above example, we would only minimize  . Thus, the cost is minimized over a sample of the data rather than the true data distribution.
. Thus, the cost is minimized over a sample of the data rather than the true data distribution.
When  some form of online learning must be used, where the cost is partially minimized as each new example is seen. While online learning is often used when is fixed, it is most useful in the case where the distribution changes slowly over time. In neural network methods, some form of online learning is frequently also used for finite datasets.
some form of online learning must be used, where the cost is partially minimized as each new example is seen. While online learning is often used when is fixed, it is most useful in the case where the distribution changes slowly over time. In neural network methods, some form of online learning is frequently also used for finite datasets.
[edit] Choosing a cost function
While it is possible to arbitrarily define some ad hoc cost function, frequently a particular cost will be used either because it has desirable properties (such as convexity) or because it arises naturally from a particular formulation of the problem (i.e., In a probabilistic formulation the posterior probability of the model can be used as an inverse cost). Ultimately, the cost function will depend on the task we wish to perform. The three main categories of learning tasks are overviewed below.
[edit] Learning paradigms
There are three major learning paradigms, each corresponding to a particular abstract learning task. These are supervised learning, unsupervised learning and reinforcement learning. Usually any given type of network architecture can be employed in any of those tasks.
[edit] Supervised learning
In supervised learning, we are given a set of example pairs  and the aim is to find a function in the allowed class of functions that matches the examples. In other words, we wish to infer the mapping implied by the data; the cost function is related to the mismatch between our mapping and the data and it implicitly contains prior knowledge about the problem domain.
and the aim is to find a function in the allowed class of functions that matches the examples. In other words, we wish to infer the mapping implied by the data; the cost function is related to the mismatch between our mapping and the data and it implicitly contains prior knowledge about the problem domain.
A commonly used cost is the mean-squared error which tries to minimize the average squared error between the network's output, f(x), and the target value y over all the example pairs. When one tries to minimise this cost using gradient descent for the class of neural networks called Multi-Layer Perceptrons, one obtains the common and well-known backpropagation algorithm for training neural networks.
Tasks that fall within the paradigm of supervised learning are pattern recognition (also known as classification) and regression (also known as function approximation). The supervised learning paradigm is also applicable to sequential data (e.g., for speech and gesture recognition). This can be thought of as learning with a "teacher," in the form of a function that provides continuous feedback on the quality of solutions obtained thus far.
[edit] Unsupervised learning
In unsupervised learning we are given some data x and the cost function to be minimized, that can be any function of the data x and the network's output, f.
The cost function is dependent on the task (what we are trying to model) and our a priori assumptions (the implicit properties of our model, its parameters and the observed variables).
As a trivial example, consider the model f(x) = a, where a is a constant and the cost C = E[(x − f(x))2]. Minimizing this cost will give us a value of a that is equal to the mean of the data. The cost function can be much more complicated. Its form depends on the application: For example in compression it could be related to the mutual information between x and y. In statistical modelling, it could be related to the posterior probability of the model given the data. (Note that in both of those examples those quantities would be maximized rather than minimised).
Tasks that fall within the paradigm of unsupervised learning are in general estimation problems; the applications include clustering, the estimation of statistical distributions, compression and filtering.
[edit] Reinforcement learning
In reinforcement learning, data x is usually not given, but generated by an agent's interactions with the environment. At each point in time t, the agent performs an action yt and the environment generates an observation xt and an instantaneous cost ct, according to some (usually unknown) dynamics. The aim is to discover a policy for selecting actions that minimizes some measure of a long-term cost, i.e. the expected cumulative cost. The environment's dynamics and the long-term cost for each policy are usually unknown, but can be estimated.
More formally, the environment is modeled as a Markov decision process (MDP) with states  S and actions
S and actions  with the following probability distributions: the instantaneous cost distribution P(ct | st), the observation distribution P(xt | st) and the transition P(st + 1 | st,at), while a policy is defined as conditional distribution over actions given the observations. Taken together, the two define a Markov chain (MC). The aim is to discover the policy that minimizes the cost, i.e. the MC for which the cost is minimal.
with the following probability distributions: the instantaneous cost distribution P(ct | st), the observation distribution P(xt | st) and the transition P(st + 1 | st,at), while a policy is defined as conditional distribution over actions given the observations. Taken together, the two define a Markov chain (MC). The aim is to discover the policy that minimizes the cost, i.e. the MC for which the cost is minimal.
ANNs are frequently used in reinforcement learning as part of the overall algorithm.
Tasks that fall within the paradigm of reinforcement learning are control problems, games and other sequential decision making tasks.
See also: dynamic programming, stochastic control
[edit] Learning algorithms
Training a neural network model essentially means selecting one model from the set of allowed models (or, in a Bayesian framework, determining a distribution over the set of allowed models) that minimises the cost criterion. There are numerous algorithms available for training neural network models; most of them can be viewed as a straightforward application of optimization theory and statistical estimation.
Most of the algorithms used in training artificial neural networks are employing some form of gradient descent. This is done by simply taking the derivative of the cost function with respect to the network parameters and then changing those parameters in a gradient-related direction.
Evolutionary methods, simulated annealing, and expectation-maximization and non-parametric methods are among other commonly used methods for training neural networks. See also machine learning.
Temporal perceptual learning relies on finding temporal relationships in sensory signal streams. In an environment, statistically salient temporal correlations can be found by monitoring the arrival times of sensory signals. This is done by the perceptual network.
[edit] Employing artificial neural networks
Perhaps the greatest advantage of ANNs is their ability to be used as an arbitrary function approximation mechanism which 'learns' from observed data. However, using them is not so straightforward and a relatively good understanding of the underlying theory is essential.
- Choice of model: This will depend on the data representation and the application. Overly complex models tend to lead to problems with learning.
- Learning algorithm: There are numerous tradeoffs between learning algorithms. Almost any algorithm will work well with the correct hyperparameters for training on a particular fixed dataset. However selecting and tuning an algorithm for training on unseen data requires a significant amount of experimentation.
- Robustness: If the model, cost function and learning algorithm are selected appropriately the resulting ANN can be extremely robust.
With the correct implementation ANNs can be used naturally in online learning and large dataset applications. Their simple implementation and the existence of mostly local dependencies exhibited in the structure allows for fast, parallel implementations in hardware.
[edit] Applications
The utility of artificial neural network models lies in the fact that they can be used to infer a function from observations. This is particularly useful in applications where the complexity of the data or task makes the design of such a function by hand impractical.
[edit] Real life applications
The tasks to which artificial neural networks are applied tend to fall within the following broad categories:
- Function approximation, or regression analysis, including time series prediction, fitness approximation and modelling.
- Classification, including pattern and sequence recognition, novelty detection and sequential decision making.
- Data processing, including filtering, clustering, blind source separation and compression.
Application areas include system identification and control (vehicle control, process control), game-playing and decision making (backgammon, chess, racing), pattern recognition (radar systems, face identification, object recognition and more), sequence recognition (gesture, speech, handwritten text recognition), medical diagnosis, financial applications (automated trading systems), data mining (or knowledge discovery in databases, "KDD"), visualization and e-mail spam filtering.
[edit] Neural network software
Neural network software is used to simulate, research, develop and apply artificial neural networks, biological neural networks and in some cases a wider array of adaptive systems. See also logistic regression.
[edit] Types of neural networks
[edit] Feedforward neural network
The feedforward neural network was the first and arguably simplest type of artificial neural network devised. In this network, the information moves in only one direction, forward, from the input nodes, through the hidden nodes (if any) and to the output nodes. There are no cycles or loops in the network.
[edit] Radial basis function (RBF) network
Radial Basis Functions are powerful techniques for interpolation in multidimensional space. A RBF is a function which has built into a distance criterion with respect to a centre. Radial basis functions have been applied in the area of neural networks where they may be used as a replacement for the sigmoidal hidden layer transfer characteristic in Multi-Layer Perceptrons. RBF networks have two layers of processing: In the first, input is mapped onto each RBF in the 'hidden' layer. The RBF chosen is usually a Gaussian. In regression problems the output layer is then a linear combination of hidden layer values representing mean predicted output. The interpretation of this output layer value is the same as a regression model in statistics. In classification problems the output layer is typically a sigmoid function of a linear combination of hidden layer values, representing a posterior probability. Performance in both cases is often improved by shrinkage techniques, known as ridge regression in classical statistics and known to correspond to a prior belief in small parameter values (and therefore smooth output functions) in a Bayesian framework.
RBF networks have the advantage of not suffering from local minima in the same way as Multi-Layer Perceptrons. This is because the only parameters that are adjusted in the learning process are the linear mapping from hidden layer to output layer. Linearity ensures that the error surface is quadratic and therefore has a single easily found minimum. In regression problems this can be found in one matrix operation. In classification problems the fixed non-linearity introduced by the sigmoid output function is most efficiently dealt with using iteratively re-weighted least squares.
RBF networks have the disadvantage of requiring good coverage of the input space by radial basis functions. RBF centres are determined with reference to the distribution of the input data, but without reference to the prediction task. As a result, representational resources may be wasted on areas of the input space that are irrelevant to the learning task. A common solution is to associate each data point with its own centre, although this can make the linear system to be solved in the final layer rather large, and requires shrinkage techniques to avoid overfitting.
Associating each input datum with an RBF leads naturally to kernel methods such as Support Vector Machines and Gaussian Processes (the RBF is the kernel function). All three approaches use a non-linear kernel function to project the input data into a space where the learning problem can be solved using a linear model. Like Gaussian Processes, and unlike SVMs, RBF networks are typically trained in a Maximum Likelihood framework by maximizing the probability (minimizing the error) of the data under the model. SVMs take a different approach to avoiding overfitting by maximizing instead a margin. RBF networks are outperformed in most classification applications by SVMs. In regression applications they can be competitive when the dimensionality of the input space is relatively small.
[edit] Kohonen self-organizing network
The self-organizing map (SOM) invented by Teuvo Kohonen performs a form of unsupervised learning. A set of artificial neurons learn to map points in an input space to coordinates in an output space. The input space can have different dimensions and topology from the output space, and the SOM will attempt to preserve these.
[edit] Recurrent network
Contrary to feedforward networks, recurrent neural networks (RNs) are models with bi-directional data flow. While a feedforward network propagates data linearly from input to output, RNs also propagate data from later processing stages to earlier stages.
[edit] Simple recurrent network
A simple recurrent network (SRN) is a variation on the Multi-Layer Perceptron, sometimes called an "Elman network" due to its invention by Jeff Elman. A three-layer network is used, with the addition of a set of "context units" in the input layer. There are connections from the middle (hidden) layer to these context units fixed with a weight of one. At each time step, the input is propagated in a standard feed-forward fashion, and then a learning rule (usually back-propagation) is applied. The fixed back connections result in the context units always maintaining a copy of the previous values of the hidden units (since they propagate over the connections before the learning rule is applied). Thus the network can maintain a sort of state, allowing it to perform such tasks as sequence-prediction that are beyond the power of a standard Multi-Layer Perceptron.
In a fully recurrent network, every neuron receives inputs from every other neuron in the network. These networks are not arranged in layers. Usually only a subset of the neurons receive external inputs in addition to the inputs from all the other neurons, and another disjunct subset of neurons report their output externally as well as sending it to all the neurons. These distinctive inputs and outputs perform the function of the input and output layers of a feed-forward or simple recurrent network, and also join all the other neurons in the recurrent processing.
[edit] Hopfield network
The Hopfield network is a recurrent neural network in which all connections are symmetric. Invented by John Hopfield in 1982, this network guarantees that its dynamics will converge. If the connections are trained using Hebbian learning then the Hopfield network can perform as robust content-addressable (or associative) memory, resistant to connection alteration.
[edit] Echo state network
The echo state network (ESN) is a recurrent neural network with a sparsely connected random hidden layer. The weights of output neurons are the only part of the network that can change and be learned. ESN are good to (re)produce temporal patterns.
[edit] Long short term memory network
The Long short term memory is an artificial neural net structure that unlike traditional RNNs doesn't have the problem of vanishing gradients. It can therefore use long delays and can handle signals that have a mix of low and high frequency components.
[edit] Stochastic neural networks
A stochastic neural network differs from a typical neural network because it introduces random variations into the network. In a probabilistic view of neural networks, such random variations can be viewed as a form of statistical sampling, such as Monte Carlo sampling.
[edit] Boltzmann machine
The Boltzmann machine can be thought of as a noisy Hopfield network. Invented by Geoff Hinton and Terry Sejnowski in 1985, the Boltzmann machine is important because it is one of the first neural networks to demonstrate learning of latent variables (hidden units). Boltzmann machine learning was at first slow to simulate, but the contrastive divergence algorithm of Geoff Hinton (circa 2000) allows models such as Boltzmann machines and products of experts to be trained much faster.
[edit] Modular neural networks
Biological studies have shown that the human brain functions not as a single massive network, but as a collection of small networks. This realization gave birth to the concept of modular neural networks, in which several small networks cooperate or compete to solve problems.
[edit] Committee of machines
A committee of machines (CoM) is a collection of different neural networks that together "vote" on a given example. This generally gives a much better result compared to other neural network models. Because neural networks suffer from local minima, starting with the same architecture and training but using different initial random weights often gives vastly different networks[citation needed]. A CoM tends to stabilize the result.
The CoM is similar to the general machine learning bagging method, except that the necessary variety of machines in the committee is obtained by training from different random starting weights rather than training on different randomly selected subsets of the training data.
[edit] Associative neural network (ASNN)
The ASNN is an extension of the committee of machines that goes beyond a simple/weighted average of different models. ASNN represents a combination of an ensemble of feed-forward neural networks and the k-nearest neighbor technique (kNN). It uses the correlation between ensemble responses as a measure of distance amid the analyzed cases for the kNN. This corrects the bias of the neural network ensemble. An associative neural network has a memory that can coincide with the training set. If new data become available, the network instantly improves its predictive ability and provides data approximation (self-learn the data) without a need to retrain the ensemble. Another important feature of ASNN is the possibility to interpret neural network results by analysis of correlations between data cases in the space of models. The method is demonstrated at www.vcclab.org, where you can either use it online or download it.
[edit] Other types of networks
These special networks do not fit in any of the previous categories.
[edit] Holographic associative memory
Holographic associative memory represents a family of analog, correlation-based, associative, stimulus-response memories, where information is mapped onto the phase orientation of complex numbers operating.
[edit] Instantaneously trained networks
Instantaneously trained neural networks (ITNNs) were inspired by the phenomenon of short-term learning that seems to occur instantaneously. In these networks the weights of the hidden and the output layers are mapped directly from the training vector data. Ordinarily, they work on binary data, but versions for continuous data that require small additional processing are also available.
[edit] Spiking neural networks
Spiking neural networks (SNNs) are models which explicitly take into account the timing of inputs. The network input and output are usually represented as series of spikes (delta function or more complex shapes). SNNs have an advantage of being able to process information in the time domain (signals that vary over time). They are often implemented as recurrent networks. SNNs are also a form of pulse computer.
Networks of spiking neurons — and the temporal correlations of neural assemblies in such networks — have been used to model figure/ground separation and region linking in the visual system (see e.g. Reitboeck et al.in Haken and Stadler: Synergetics of the Brain. Berlin, 1989).
Gerstner and Kistler have a freely available online textbook on Spiking Neuron Models.
Spiking neural networks with axonal conduction delays exhibit polychronization, and hence could have a potentially unlimited memory capacity.[citation needed]
In June 2005 IBM announced construction of a Blue Gene supercomputer dedicated to the simulation of a large recurrent spiking neural network [1].
[edit] Dynamic neural networks
Dynamic neural networks not only deal with nonlinear multivariate behaviour, but also include (learning of) time-dependent behaviour such as various transient phenomena and delay effects.
[edit] Cascading neural networks
Cascade-Correlation is an architecture and supervised learning algorithm developed by Scott Fahlman and Christian Lebiere. Instead of just adjusting the weights in a network of fixed topology, Cascade-Correlation begins with a minimal network, then automatically trains and adds new hidden units one by one, creating a multi-layer structure. Once a new hidden unit has been added to the network, its input-side weights are frozen. This unit then becomes a permanent feature-detector in the network, available for producing outputs or for creating other, more complex feature detectors. The Cascade-Correlation architecture has several advantages over existing algorithms: it learns very quickly, the network determines its own size and topology, it retains the structures it has built even if the training set changes, and it requires no back-propagation of error signals through the connections of the network. See: Cascade correlation algorithm.
[edit] Neuro-fuzzy networks
A neuro-fuzzy network is a fuzzy inference system in the body of an artificial neural network. Depending on the FIS type, there are several layers that simulate the processes involved in a fuzzy inference like fuzzification, inference, aggregation and defuzzification. Embedding an FIS in a general structure of an ANN has the benefit of using available ANN training methods to find the parameters of a fuzzy system.
[edit] Compositional pattern-producing networks
Compositional pattern-producing networks (CPPNs) are a variation of ANNs which differ in their set of activation functions and how they are applied. While typical ANNs often contain only sigmoid functions (and sometimes Gaussian functions), CPPNs can include both types of functions and many others. Furthermore, unlike typical ANNs, CPPNs are applied across the entire space of possible inputs so that they can represent a complete image. Since they are compositions of functions, CPPNs in effect encode images at infinite resolution and can be sampled for a particular display at whatever resolution is optimal.
[edit] One-shot associative memory
This type of network can add new patterns without the need for re-training. It is done by creating a specific memory structure, which assigns each new pattern to an orthogonal plane using adjacently connected hierarchical arrays [1]. The network offers real-time pattern recognition and high scalability, it however requires parallel processing and is thus best suited for platforms such as Wireless sensor networks (WSN), Grid computing, and GPGPUs.
[edit] Theoretical properties
[edit] Computational power
The multi-layer perceptron (MLP) is a universal function approximator, as proven by the Cybenko theorem. However, the proof is not constructive regarding the number of neurons required or the settings of the weights.
Work by Hava Siegelmann and Eduardo D. Sontag has provided a proof that a specific recurrent architecture with rational valued weights (as opposed to the commonly used floating point approximations) has the full power of a Universal Turing Machine[2] using a finite number of neurons and standard linear connections. They have further shown that the use of irrational values for weights results in a machine with super-Turing power.
[edit] Capacity
Artificial neural network models have a property called 'capacity', which roughly corresponds to their ability to model any given function. It is related to the amount of information that can be stored in the network and to the notion of complexity.
[edit] Convergence
Nothing can be said in general about convergence since it depends on a number of factors. Firstly, there may exist many local minima. This depends on the cost function and the model. Secondly, the optimization method used might not be guaranteed to converge when far away from a local minimum. Thirdly, for a very large amount of data or parameters, some methods become impractical. In general, it has been found that theoretical guarantees regarding convergence are an unreliable guide to practical application.
[edit] Generalisation and statistics
In applications where the goal is to create a system that generalises well in unseen examples, the problem of overtraining has emerged. This arises in overcomplex or overspecified systems when the capacity of the network significantly exceeds the needed free parameters. There are two schools of thought for avoiding this problem: The first is to use cross-validation and similar techniques to check for the presence of overtraining and optimally select hyperparameters such as to minimise the generalisation error. The second is to use some form of regularisation. This is a concept that emerges naturally in a probabilistic (Bayesian) framework, where the regularisation can be performed by selecting a larger prior probability over simpler models; but also in statistical learning theory, where the goal is to minimise over two quantities: the 'empirical risk' and the 'structural risk', which roughly correspond to the error over the training set and the predicted error in unseen data due to overfitting.

Supervised neural networks that use an MSE cost function can use formal statistical methods to determine the confidence of the trained model. The MSE on a validation set can be used as an estimate for variance. This value can then be used to calculate the confidence interval of the output of the network, assuming a normal distribution. A confidence analysis made this way is statistically valid as long as the output probability distribution stays the same and the network is not modified.
By assigning a softmax activation function on the output layer of the neural network (or a softmax component in a component-based neural network) for categorical target variables, the outputs can be interpreted as posterior probabilities. This is very useful in classification as it gives a certainty measure on classifications.
The softmax activation function: 
[edit] Dynamic properties
|
|
This article is in need of attention from an expert on the subject. WikiProject Technology or the Technology Portal may be able to help recruit one. (November 2008) |
Various techniques originally developed for studying disordered magnetic systems (i.e. the spin glass) have been successfully applied to simple neural network architectures, such as the Hopfield network. Influential work by E. Gardner and B. Derrida has revealed many interesting properties about perceptrons with real-valued synaptic weights, while later work by W. Krauth and M. Mezard has extended these principles to binary-valued synapses.
[edit] See also
| Wikibooks has a book on the topic of |
- 20Q
- Adaptive resonance theory
- Artificial life
- Associative memory
- Autoencoder
- Biological neural network
- Biologically-inspired computing
- Blue brain
- Clinical decision support system
- Connectionist expert system
- Decision tree
- Expert system
- Fuzzy logic
- Genetic algorithm
- Gnod, a Kohonen network application
- Linear discriminant analysis
- Logistic regression
- Memristor
- Multilayer perceptron
- Nearest neighbor (pattern recognition)
- Neural network
- Neuroevolution, NeuroEvolution of Augmented Topologies (NEAT)
- Neural network software
- Ni1000 chip
- Optical neural network
- Particle swarm optimization
- Perceptron
- Predictive analytics
- Principal components analysis
- Regression analysis
- Simulated annealing
- Systolic array
- Systolic automaton
- Time delay neural network (TDNN)
- Time delay dynamic neural units (TmD-DNU)
[edit] Patents
- Arima, et al., U.S. Patent 5,293,457,"Neural network integrated circuit device having self-organizing function". March 8, 1994.
[edit] Bibliography
- Bar-Yam, Yaneer (2005). Making Things Work. Please see Chapter 3
- Bhadeshia H. K. D. H. (1999). "Neural Networks in Materials Science". ISIJ International 39: 966–979. doi:.
- Bhagat, P.M. (2005) Pattern Recognition in Industry, Elsevier. ISBN 0-08-044538-1
- Bishop, C.M. (1995) Neural Networks for Pattern Recognition, Oxford: Oxford University Press. ISBN 0-19-853849-9 (hardback) or ISBN 0-19-853864-2 (paperback)
- Cybenko, G.V. (1989). Approximation by Superpositions of a Sigmoidal function, Mathematics of Control, Signals and Systems, Vol. 2 pp. 303-314. electronic version
- Duda, R.O., Hart, P.E., Stork, D.G. (2001) Pattern classification (2nd edition), Wiley, ISBN 0-471-05669-3
- Egmont-Petersen, M., de Ridder, D., Handels, H. (2002). "Image processing with neural networks - a review". Pattern Recognition 35 (10): 2279–2301. doi:.
- Gurney, K. (1997) An Introduction to Neural Networks London: Routledge. ISBN 1-85728-673-1 (hardback) or ISBN 1-85728-503-4 (paperback)
- Haykin, S. (1999) Neural Networks: A Comprehensive Foundation, Prentice Hall, ISBN 0-13-273350-1
- Fahlman, S, Lebiere, C (1991). The Cascade-Correlation Learning Architecture, created for National Science Foundation, Contract Number EET-8716324, and Defense Advanced Research Projects Agency (DOD), ARPA Order No. 4976 under Contract F33615-87-C-1499. electronic version
- Hertz, J., Palmer, R.G., Krogh. A.S. (1990) Introduction to the theory of neural computation, Perseus Books. ISBN 0-201-51560-1
- Lawrence, Jeanette (1994) Introduction to Neural Networks, California Scientific Software Press. ISBN 1-883157-00-5
- Masters, Timothy (1994) Signal and Image Processing with Neural Networks, John Wiley & Sons, Inc. ISBN 0-471-04963-8
- Ness, Erik. 2005. SPIDA-Web. Conservation in Practice 6(1):35-36. On the use of artificial neural networks in species taxonomy.
- Ripley, Brian D. (1996) Pattern Recognition and Neural Networks, Cambridge
- Siegelmann, H.T. and Sontag, E.D. (1994). Analog computation via neural networks, Theoretical Computer Science, v. 131, no. 2, pp. 331-360. electronic version
- Smith, Murray (1993) Neural Networks for Statistical Modeling, Van Nostrand Reinhold, ISBN 0-442-01310-8
- Wasserman, Philip (1993) Advanced Methods in Neural Computing, Van Nostrand Reinhold, ISBN 0-442-00461-3
[edit] Notes
- ^ B.B. Nasution, A.I. Khan, A Hierarchical Graph Neuron Scheme for Real-Time Pattern Recognition, IEEE Transactions on Neural Networks, vol 19(2), 212-229, Feb. 2008
- ^ http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.47.8383
[edit] External links
- A close view to Artificial Neural Networks Algorithms
- Neural Networks at the Open Directory Project
- Neural Networks in Materials Science
- A great practical tutorial on Neural Networks
- Applications of neural networks

