Riemann sphere
From Wikipedia, the free encyclopedia
In mathematics, the Riemann sphere is a way of extending the plane of complex numbers with one additional point at infinity, in a way that makes expressions such as

well-behaved and useful, at least in certain contexts. It is named after 19th century mathematician Bernhard Riemann. It is also called
- the complex projective line, denoted
 , and
, and - the extended complex plane, denoted
 or
or  .
.
On a purely algebraic level, the complex numbers with an extra infinity element constitute a number system known as the extended complex numbers. Arithmetic with infinity does not obey all of the usual rules of algebra, and so the extended complex numbers do not form a field. However, the Riemann sphere is geometrically and analytically well-behaved, even at infinity; it is a one-dimensional complex manifold, also called a Riemann surface.
In complex analysis, the Riemann sphere facilitates an elegant theory of meromorphic functions. The Riemann sphere is ubiquitous in projective geometry and algebraic geometry as a fundamental example of a complex manifold, projective space, and algebraic variety. It also finds utility in other disciplines that depend on analysis and geometry, such as quantum mechanics and other branches of physics.
Contents |
[edit] As a complex manifold
As a one-dimensional complex manifold, the Riemann sphere can be described by two charts, both with domain equal to the complex number plane  . Let ζ and ξ be complex coordinates on . Identify the nonzero complex numbers ζ with the nonzero complex numbers ξ using the transition maps
. Let ζ and ξ be complex coordinates on . Identify the nonzero complex numbers ζ with the nonzero complex numbers ξ using the transition maps
- ζ = 1 / ξ,
- ξ = 1 / ζ.
Since the transition maps are holomorphic, they define a complex manifold, called the Riemann sphere.
Intuitively, the transition maps indicate how to glue two planes together to form the Riemann sphere. The planes are glued in an "inside-out" manner, so that they overlap almost everywhere, with each plane contributing just one point (its origin) missing from the other plane. In other words, (almost) every point in the Riemann sphere has both a ζ value and a ξ value, and the two values are related by ζ = 1 / ξ. The point where ξ = 0 should then have ζ-value "1 / 0"; in this sense, the origin of the ξ-chart plays the role of " " in the ζ-chart. Symmetrically, the origin of the ζ-chart plays the role of with respect to the ξ-chart.
" in the ζ-chart. Symmetrically, the origin of the ζ-chart plays the role of with respect to the ξ-chart.
Topologically, the resulting space is the one-point compactification of a plane into the sphere. However, the Riemann sphere is not merely a topological sphere. It is a sphere with a well-defined complex structure, so that around every point on the sphere there is a neighborhood that can be biholomorphically identified with .
On the other hand, the uniformization theorem, a central result in the classification of Riemann surfaces, states that the only simply-connected one-dimensional complex manifolds are the complex plane, the hyperbolic plane, and the Riemann sphere. Of these, the Riemann sphere is the only one that is a closed surface (a compact surface without boundary). Hence the two-dimensional sphere admits a unique complex structure turning it into a one-dimensional complex manifold.
[edit] As the complex projective line
The Riemann sphere can also be defined as the complex projective line. This is the subset of  consisting of all pairs (α,β) of complex numbers, not both zero, modulo the equivalence relation
consisting of all pairs (α,β) of complex numbers, not both zero, modulo the equivalence relation
- (α,β) = (λα,λβ)
for all nonzero complex numbers λ. The complex plane , with coordinate ζ, can be mapped into the complex projective line by
- (α,β) = (ζ,1).
Another copy of with coordinate ξ can be mapped in by
- (α,β) = (1,ξ).
These two complex charts cover the projective line. For nonzero ξ the identifications
- (1,ξ) = (1 / ξ,1) = (ζ,1)
demonstrate that the transition maps are ζ = 1 / ξ and ξ = 1 / ζ, as above.
This treatment of the Riemann sphere connects most readily to projective geometry. For example, any line (or smooth conic) in the complex projective plane is biholomorphic to the complex projective line. It is also convenient for studying the sphere's automorphisms, later in this article.
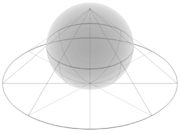
[edit] As a sphere

The Riemann sphere can be visualized as the unit sphere x2 + y2 + z2 = 1 in the three-dimensional real space  . To this end, consider the stereographic projection from the unit sphere minus the point (0,0,1) onto the plane z = 0, which we identify with the complex plane by ζ = x + iy. In Cartesian coordinates (x,y,z) and spherical coordinates (φ,θ) on the sphere (with φ the zenith and θ the azimuth), the projection is
. To this end, consider the stereographic projection from the unit sphere minus the point (0,0,1) onto the plane z = 0, which we identify with the complex plane by ζ = x + iy. In Cartesian coordinates (x,y,z) and spherical coordinates (φ,θ) on the sphere (with φ the zenith and θ the azimuth), the projection is

Similarly, stereographic projection from (0,0, − 1) onto the z = 0 plane, identified with another copy of the complex plane by ξ = x − iy, is written

(The two complex planes are identified differently with the plane z = 0. An orientation-reversal is necessary to maintain consistent orientation on the sphere, and in particular complex conjugation causes the transition maps to be holomorphic.) The transition maps between ζ-coordinates and ξ-coordinates are obtained by composing one projection with the inverse of the other. They turn out to be ζ = 1 / ξ and ξ = 1 / ζ, as described above. Thus the unit sphere is diffeomorphic to the Riemann sphere.
Under this diffeomorphism, the unit circle in the ζ-chart, the unit circle in the ξ-chart, and the equator of the unit sphere are all identified. The unit disk | ζ | < 1 is identified with the southern hemisphere z < 0, while the unit disk | ξ | < 1 is identified with the northern hemisphere z > 0.
[edit] Metric
A Riemann surface does not come equipped with any particular Riemannian metric. However, the complex structure of the Riemann surface does uniquely determine a metric up to conformal equivalence. (Two metrics are said to be conformally equivalent if they differ by multiplication by a positive smooth function.) Conversely, any metric on an oriented surface uniquely determines a complex structure, which depends on the metric only up to conformal equivalence. Complex structures on an oriented surface are therefore in one-to-one correspondence with conformal classes of metrics on that surface.
Within a given conformal class, one can use conformal symmetry to find a representative metric with convenient properties. In particular, there is always a complete metric with constant curvature in any given conformal class.
In the case of the Riemann sphere, the Gauss-Bonnet theorem implies that a constant-curvature metric must have positive curvature K. It follows that the metric must be isometric to the sphere of radius  in via stereographic projection. In the ζ-chart on the Riemann sphere, the metric with K = 1 is given by
in via stereographic projection. In the ζ-chart on the Riemann sphere, the metric with K = 1 is given by

In real coordinates ζ = u + iv, the formula is

Up to a constant factor, this metric agrees with the standard Fubini-Study metric on complex projective space (of which the Riemann sphere is an example).
Conversely, let S denote the sphere (as an abstract smooth or topological manifold). By the uniformization theorem there exists a unique complex structure on S. It follows that any metric on S is conformally equivalent to the round metric. All such metrics determine the same conformal geometry. The round metric is therefore not intrinsic to the Riemann sphere, since "roundness" is not an invariant of conformal geometry. The Riemann sphere is only a conformal manifold not a Riemannian manifold. However, if one needs to do Riemannian geometry on the Riemann sphere, the round metric is a natural choice.
[edit] Automorphisms

The study of any mathematical object is aided by an understanding of its group of automorphisms, meaning the maps from the object to itself that preserve the essential structure of the object. In the case of the Riemann sphere, an automorphism is an invertible biholomorphic map from the Riemann sphere to itself. It turns out that the only such maps are the Möbius transformations. These are functions of the form
where a, b, c, and d are complex numbers such that  . Examples of Möbius transformations include dilations, rotations, translations, and complex inversion. In fact, any Möbius transformation can be written as a composition of these.
. Examples of Möbius transformations include dilations, rotations, translations, and complex inversion. In fact, any Möbius transformation can be written as a composition of these.
The Möbius transformations are profitably viewed as transformations on the complex projective line. In projective coordinates, the transformation f can be written

Thus the Möbius transformations can be described as  complex matrices with nonzero determinant; two matrices yield the same Möbius transformation if and only if they differ by a nonzero constant. Thus the Möbius transformations exactly correspond to the projective linear transformations
complex matrices with nonzero determinant; two matrices yield the same Möbius transformation if and only if they differ by a nonzero constant. Thus the Möbius transformations exactly correspond to the projective linear transformations  .
.
If one endows the Riemann sphere with the Fubini-Study metric, then not all Möbius transformations are isometries; for example, the dilations and translations are not. The isometries form a proper subgroup of , namely PSU2. This subgroup is isomorphic to the rotation group SO(3), which is the isometry group of the unit sphere in .
[edit] Applications
In complex analysis, a meromorphic function on the complex plane (or on any Riemann surface, for that matter) is a ratio f / g of two holomorphic functions f and g. As a map to the complex numbers, it is undefined wherever g is zero. However, it induces a holomorphic map (f,g) to the complex projective line that is well-defined even where g = 0. This construction is helpful in the study of holomorphic and meromorphic functions. For example, on a compact Riemann surface there are no non-constant holomorphic maps to the complex numbers, but holomorphic maps to the complex projective line are abundant.
The Riemann sphere has many uses in physics. In quantum mechanics, points on the complex projective line are natural values for photon polarization states, spin states of massive particles of spin 1/2, and 2-state particles in general. The Riemann sphere has been suggested as a relativistic model for the celestial sphere. In string theory, the worldsheets of strings are Riemann surfaces, and the Riemann sphere, being the simplest Riemann surface, plays a significant role. It is also important in twistor theory.
[edit] References
- Brown, James and Churchill, Ruel (1989). Complex Variables and Applications. New York: McGraw-Hill. ISBN 0070109052.
- Griffiths, Phillip and Harris, Joseph (1978). Principles of Algebraic Geometry. John Wiley & Sons. ISBN 0-471-32792-1.
- Penrose, Roger (2005). The Road to Reality. New York: Knopf. ISBN 0-679-45443-8.
- Rudin, Walter (1987). Real and Complex Analysis. New York: McGraw-Hill. ISBN 0071002766.
[edit] See also
[edit] External links
- Moebius Transformations Revealed, by Douglas N. Arnold and Jonathan Rogness (a video by two University of Minnesota professors explaining and illustrating Möbius transformations using stereographic projection from a sphere)

