Geodetic system
From Wikipedia, the free encyclopedia
Geodetic systems or geodetic data are used in geodesy, navigation, surveying by cartographers and satellite navigation systems to translate positions indicated on their products to their real position on earth.
The systems are needed because the earth is not a perfect sphere.
Examples of map data are:
- WGS 84, 72, 64 and 60 of the World Geodetic System
- NAD83, the North American Datum which is very similar to WGS84
- NAD27, the older North American Datum, of which NAD83 was basically a readjustment [1]
- OSGB36 of the Ordnance Survey of Great Britain
- ED50 : the European Datum
The difference in co-ordinates between data is commonly referred to as datum shift. The datum shift between two particular datums can vary from one place to another within one country or region, and can be anything from zero to hundreds of metres (or several kilometres for some remote islands). The North Pole, South Pole and Equator may be assumed to be in different positions on different datums, so True North may be very slightly different. Different datums use different estimates for the precise shape and size of the Earth (reference ellipsoids).
The difference between WGS84 and OSGB36 is up to 140 metres (450 feet), which for some navigational purposes is an insignificant error. For most applications, such as surveying and dive site location for SCUBA divers, 140 metres is an unacceptably large error.
The main reason that there are a number of datums is that before the advent of GPS positioning, national map making organizations did not have a common surveying reference point and only produced maps for their locality.
[edit] Datum
In surveying and geodesy, a datum is a reference point or surface against which position measurements are made, and an associated model of the shape of the earth for computing positions. Horizontal datums are used for describing a point on the earth's surface, in latitude and longitude or another coordinate system. Vertical datums are used to measure elevations or underwater depths.
[edit] Horizontal datums
The horizontal datum is the model used to measure positions on the earth. A specific point on the earth can have substantially different coordinates, depending on the datum used to make the measurement. There are hundreds of locally-developed horizontal datums around the world, usually referenced to some convenient local reference point. Contemporary datums, based on increasingly accurate measurements of the shape of the earth, are intended to cover larger areas. The WGS 84 datum, which is almost identical to the NAD83 datum used in North America, is a common standard datum.
[edit] Vertical datum
A vertical datum is used for measuring the elevations of points on the earth's surface. Vertical data are either tidal, based on sea levels, gravimetric, based on a geoid, or geodetic, based on the same ellipsoid models of the earth used for computing horizontal datums.
In common usage, elevations are often cited in height above sea level; this is a widely used tidal datum. Because ocean tides cause water levels to change constantly, the sea level is generally taken to be some average of the tide heights. Mean lower low water — the average of the lowest points the tide reached on each day during a measuring period of several years — is the datum used for measuring water depths on some nautical charts, for example; this is called the chart datum. Whilst the use of sea-level as a datum is useful for geologically recent topographic features, sea level has not stayed constant throughout geological time, so is less useful when measuring very long-term processes.
A geodetic vertical datum takes some specific zero point, and computes elevations based on the geodetic model being used, without further reference to sea levels. Usually, the starting reference point is a tide gauge, so at that point the geodetic and tidal datums might match, but due to sea level variations, the two scales may not match elsewhere. One example of a geoid datum is NAVD88, used in North America, which is referenced to a point in Quebec, Canada.
[edit] Geodetic coordinates
In geodetic coordinates the Earth's surface is approximated by an ellipsoid and locations near the surface are described in terms of latitude (φ), longitude (λ) and height (h). The ellipsoid is completely parameterised by the semi-major axis a and the flattening f.
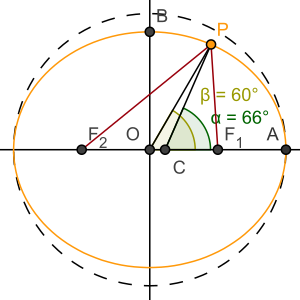
[edit] Geodetic versus geocentric latitude
It is important to note that geodetic latitude (φ) is different from geocentric latitude (φ'). Geodetic latitude is determined by the angle between the normal of the spheroid and the plane of the equator, whereas geocentric latitude is determined around the centre (see figure). Unless otherwise specified latitude is geodetic latitude.
[edit] Geodetic defining parameters
| Parameter | Symbol |
|---|---|
| Semi-major axis | a |
| Reciprocal of flattening | 1/f |
[edit] Geodetic derived geometric constants
From a and f it is possible to derive the semi-minor axis b, first eccentricity e and second eccentricity e′ of the ellipsoid
| Parameter | Value |
|---|---|
| semi-minor axis | b = a(1-f) |
| First eccentricity squared | e2 = 1-b2/a2 = 2f-f2 |
| Second eccentricity | e′2 = a2/b2 - 1 = f(2-f)/(1-f)2 |
[edit] Parameters for some geodetic systems
A more comprehensive list of geodetic systems can be found here
[edit] Australian Geodetic Datum 1966 [AGD66] and Australian Geodetic Datum 1984 (GDA84)
AGD66 and AGD84 both use the parameters defined by Australian National Spheroid (see below)
[edit] Australian National Spheroid (ANS)
| Parameter | Notation | Value |
|---|---|---|
| semi-major axis | a | 6378160.000 m |
| Reciprocal of Flattening | 1/f | 298.25 |
[edit] Geocentric Datum of Australia 1994 (GDA94) and Geocentric Datum of Australia 2000 (GDA2000)
Both GDA94 and GDA2000 use the parameters defined by GRS80 (see below)
[edit] Geodetic Reference System 1980 (GRS80)
| Parameter | Notation | Value |
|---|---|---|
| semi-major axis | a | 6378137 m |
| Reciprocal of flattening | 1/f | 298.257222101 |
see GDA Technical Manual document for more details.
[edit] World Geodetic System 1984 (WGS84)
The global positioning system (GPS) uses the world geodetic system 1984 (WGS84) to determine the location of a point near the surface of the Earth.
| Parameter | Notation | Value |
|---|---|---|
| semi-major axis | a | 6378137.0 m |
| Reciprocal of flattening | 1/f | 298.257223563 |
| Constant | Notation | Value |
|---|---|---|
| Semi-minor axis | b | 6356752.3142 m |
| First Eccentricity Squared | e2 | 6.69437999014x10-3 |
| Second Eccentricity Squared | e′2 | 6.73949674228x10-3 |
see The official World Geodetic System 1984 document for more details.
[edit] Other Earth based coordinate systems

[edit] Earth Centred Earth Fixed (ECEF) coordinates
The Earth-centred Earth-fixed (ECEF) or conventional terrestrial coordinate system rotates with the Earth and has its origin at the centre of the Earth. The X axis passes through the equator at the prime meridian. The Z axis passes through the north pole. The Y axis can be determined by the right-hand rule to be passing through the equator at 90o longitude.
[edit] Local east, north, up (ENU) coordinates
In many targeting and tracking applications the local East, North, Up (ENU) Cartesian coordinate system is far more intuitive and practical than ECEF or Geodetic coordinates. The local ENU coordinates are formed from a plane tangent to the Earth's surface fixed to a specific location and hence it is sometimes known as a "Local Tangent" or "local geodetic" plane. By convention the east axis is labeled x, the north y and the up z.
[edit] Local north, east, down (NED) coordinates
In an aeroplane most objects of interest are below you, it is therefore sensible to define down as a positive number, the NED coordinates allow you to do this as an alternative the ENU local tangent plane. By convention the north axis is labeled x', the east y' and the down z'. To avoid confusion between x and x', etc in this web page we will restrict the local coordinate frame to ENU.
[edit] Conversion
[edit] From geodetic coordinates to local ENU coordinates
To convert from geodetic coordinates to local ENU up coordinates is a two stage process
- Convert geodetic coordinates to ECEF coordinates
- Convert ECEF coordinates to local ENU coordinates
[edit] From geodetic to ECEF coordinates
Geodetic coordinates (latitude φ, longitude λ, height h) can be converted into ECEF coordinates using the following formulae:
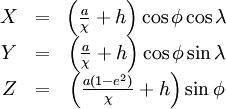
Where  a and e2 are the semi-major axis and the square of the first numerical eccentricity of the ellipsoid respectively
a and e2 are the semi-major axis and the square of the first numerical eccentricity of the ellipsoid respectively
[edit] From ECEF to ENU Coordinates
To transform from ECEF coordinates to the local coordinates we need a local reference point, typically this might be the location of a radar. If a radar is located at {Xr,Yr,Zr} and an aircraft at {Xp,Yp,Zp} then the vector pointing from the radar to the aircraft in the ENU frame is

Note: φ is the geodetic latitude. A prior version of this page showed use of the geocentric latitude (φ'). The geocentric latitude is not the appropriate up direction for the local tangent plane. If the original geodetic latitude is available it should be used, otherwise, the relationship between geodetic and geocentric latitude has an altitude dependency, and is captured by:

Note that  is also called the Normal, and is the length of the line segment, co-linear with the altitude vector and normal to the ellipsoid, which runs from the geodetic ellipsoid at the specified latitude/longitude to the intersection with the line connecting the north and south poles.
is also called the Normal, and is the length of the line segment, co-linear with the altitude vector and normal to the ellipsoid, which runs from the geodetic ellipsoid at the specified latitude/longitude to the intersection with the line connecting the north and south poles.
Obtaining geodetic latitude from geocentric coordinates from this relationship requires an iterative solution approach, otherwise the geodetic coordinates may be computed via the approach in the section below labeled "From ECEF to geodetic coordinates." Reference
http://psas.pdx.edu/CoordinateSystem/Latitude_to_LocalTangent.pdf
for another example of computing ENU coordinates.
The geocentric and geodetic longitude have the same value. This is true for the Earth and other similar shaped planets because their latitude lines (parallels) can be considered in much more degree perfect circles when compared to their longitude lines (meridians).

Note: Unambiguous determination of φ and λ requires knowledge of which quadrant the coordinates lie in.
[edit] From local ENU coordinates to geodetic coordinates
As before it is done in two stages
- Convert local ENU coordinates to ECEF coordinates
- Convert ECEF coordinates to geodetic coordinates
[edit] From ENU to ECEF
This is just the inversion of the ECEF to ENU transformation so

[edit] From ECEF to geodetic coordinates
The conversion of ECEF coordinates to geodetic coordinates (such WGS84) is a much harder problem. A number of techniques are available but the most accurate according to Zhu (Ref 6), is the following 15 step procedure summarised by Kaplan. It is assumed that geodetic parameters {a,b,e,e'} are known
![\begin{matrix}
r &=& \sqrt{X^2+Y^2}\\
E^2 &=& a^2 - b^2\\
F &=& 54b^2Z^2\\
G &=& r^2 + (1-e^2)Z^2 - e^2E^2\\
C &=& \frac{e^4Fr^2}{G^3}\\
S &=& \sqrt[3]{1+C+\sqrt{C^2 + 2C}}\\
P &=& \frac{F}{3\left(S+\frac{1}{S}+1\right)^2G^2}\\
Q &=& \sqrt{1+2e^4P}\\
r_0 & =& \frac{-(Pe^2r)}{1+Q} + \sqrt{\frac12 a^2\left(1+1/Q\right)
- \frac{P(1-e^2)Z^2}{Q(1+Q)} - \frac12
Pr^2}\\
U &=& \sqrt{(r - e^2r_0)^2 + Z^2} \\
V &=& \sqrt{(r-e^2r_0)^2 + (1-e^2)Z^2}\\
Z_0 &=& \frac{b^2Z}{aV}\\
h &=& U\left(1-\frac{b^2}{aV}\right)\\
\phi & = & \arctan\left[ \frac{Z+e'^2Z_0}{r}\right] \\
\lambda &=& \arctan2[Y,X]
\end{matrix}](http://upload.wikimedia.org/math/2/7/6/2762fe73308f90745c01c1e55f3a7c70.png)
Note: arctan2[Y,X] is the four quadrant inverse tangent function
[edit] From WGS-84 to ENU: sample code
This code works with both MATLAB and GNU Octave. It is useful for converting GPS measurements into the local ENU coordinate system.
[edit] Step 1: Convert WGS-84 to ECEF
function [X,Y,Z] = llh2xyz(lat,long, h) % Convert lat, long, height in WGS84 to ECEF X,Y,Z % lat and long given in decimal degrees. % altitude should be given in meters lat = lat/180*pi; %converting to radians long = long/180*pi; %converting to radians a = 6378137.0; % earth semimajor axis in meters f = 1/298.257223563; % reciprocal flattening e2 = 2*f -f^2; % eccentricity squared chi = sqrt(1-e2*(sin(lat)).^2); X = (a./chi +h).*cos(lat).*cos(long); Y = (a./chi +h).*cos(lat).*sin(long); Z = (a*(1-e2)./chi + h).*sin(lat);
[edit] Step 2: Convert ECEF to ENU
function [e,n,u] = xyz2enu(Xr, Yr, Zr, X, Y, Z) % convert ECEF coordinates to local east, north, up phiP = atan2(Zr,sqrt(Xr^2 + Yr^2)); lambda = atan2(Yr,Xr); e = -sin(lambda).*(X-Xr) + cos(lambda).*(Y-Yr); n = -sin(phiP).*cos(lambda).*(X-Xr) - sin(phiP).*sin(lambda).*(Y-Yr) + cos(phiP).*(Z-Zr); u = cos(phiP).*cos(lambda).*(X-Xr) + cos(phiP).*sin(lambda).*(Y-Yr) + sin(phiP).*(Z-Zr);
[edit] From ENU to WGS-84: sample code
The following code works with both MATLAB and GNU Octave. It is useful for converting from the local ENU coordinate system into the coordinate system that GPS uses.
[edit] Step 1: Convert ENU to ECEF
function [X, Y, Z] = enu2xyz(refLat, refLong, refH, e, n, u) % Convert east, north, up coordinates (labeled e, n, u) to ECEF % coordinates. The reference point (phi, lambda, h) must be given. All distances are in metres [Xr,Yr,Zr] = llh2xyz(refLat,refLong, refH); % location of reference point phiP = atan2(Zr,sqrt(Xr^2+Yr^2)); % Geocentric latitude X = -sin(refLong)*e - cos(refLong)*sin(phiP)*n + cos(refLong)*cos(phiP)*u + Xr; Y = cos(refLong)*e - sin(refLong)*sin(phiP)*n + cos(phiP)*sin(refLong)*u + Yr; Z = cos(phiP)*n + sin(phiP)*u + Zr;
[edit] Step 2: Convert ECEF to WGS-84
function [phi, lambda, h] = xyz2llh(X,Y,Z) a = 6378137.0; % earth semimajor axis in meters f = 1/298.257223563; % reciprocal flattening b = a*(1-f);% semi-minor axis e2 = 2*f-f^2;% first eccentricity squared ep2 = f*(2-f)/((1-f)^2); % second eccentricity squared r2 = X.^2+Y.^2; r = sqrt(r2); E2 = a^2 - b^2; F = 54*b^2*Z.^2; G = r2 + (1-e2)*Z.^2 - e2*E2; c = (e2*e2*F.*r2)./(G.*G.*G); s = ( 1 + c + sqrt(c.*c + 2*c) ).^(1/3); P = F./(3*(s+1./s+1).^2.*G.*G); Q = sqrt(1+2*e2*e2*P); ro = -(e2*P.*r)./(1+Q) + sqrt((a*a/2)*(1+1./Q) - ((1-e2)*P.*Z.^2)./(Q.*(1+Q)) - P.*r2/2); tmp = (r - e2*ro).^2; U = sqrt( tmp + Z.^2 ); V = sqrt( tmp + (1-e2)*Z.^2 ); zo = (b^2*Z)./(a*V); h = U.*( 1 - b^2./(a*V)); phi = atan( (Z + ep2*zo)./r ); lambda = atan2(Y,X);
Note: atan2(Y,X) uses quadrant information to return a value of lambda between − π and π.
[edit] Sample Implementation Code
clear all close all clc %% reference point refLat = 39*pi/180; refLong = -132*pi/180; refH = 0; %% Points of interest lat = [39.5*pi/180; 39.5*pi/180;39.5*pi/180]; long = [-132*pi/180;-131.5*pi/180;-131.5*pi/180]; h = [0;0;1000]; disp('lat long height') for i = 1:length(lat) disp([num2str(lat(i)*180/pi),' ', num2str(long(i)*180/pi), ' ',num2str(h(i))]) end % lat = [39.5*pi/180]; % long = [-132*pi/180]; % h = [0]; %% convering llh to enu [Xr,Yr,Zr] = llh2xyz(refLat,refLong,refH); [X,Y,Z] = llh2xyz(lat,long,h); disp('X Y Z') for i = 1:length(X) disp([num2str(X(i)),' ', num2str(Y(i)), ' ',num2str(Z(i))]) end [e,n,u] = xyz2enu(Xr, Yr, Zr, X, Y, Z); disp('e n u') for i = 1:length(e) disp([num2str(e(i)),' ', num2str(n(i)), ' ',num2str(u(i))]) end %% Converting enu to llh [X, Y, Z] = enu2xyz(refLat, refLong, refH, e, n, u); disp('X Y Z') for i = 1:length(X) disp([num2str(X(i)),' ', num2str(Y(i)), ' ',num2str(Z(i))]) end [phi, lambda, h] = xyz2llh(X,Y,Z); disp('\phi \lambda h') for i = 1:length(X) disp([num2str(phi(i)*180/pi),' ', num2str(lambda(i)*180/pi), ' ',num2str(h(i))]) end
[edit] External links
- Geodetic to Cartesian Converter
- Cartesian to Geodetic Converter (This fails for some inputs, e.g., x = 42 km, y = z = 0 m.)
- GeographicLib includes a utility CartConvert which converts between geodetic and geocentric (ECEF) or local Cartesian (ENU) coordinates. This provides accurate results for all inputs including points close to the center of the earth.
[edit] Reference material
- List of geodetic parameters for many systems
- Kaplan, Understanding GPS: principles and applications, 1 ed. Norwood, MA 02062, USA: Artech House, Inc, 1996.
- GPS Notes
- Introduction to GPS Applications
- P. Misra and P. Enge, Global Positioning System Signals, Measurements, and Performance. Lincoln, Massachusetts: Ganga-Jamuna Press, 2001.
- J. Zhu, "Conversion of Earth-centered Earth-fixed coordinates to geodetic coordinates," Aerospace and Electronic Systems, IEEE Transactions on, vol. 30, pp. 957-961, 1994.
- P. Misra and P. Enge, Global Positioning System Signals, Measurements, and Performance. Lincoln, Massachusetts: Ganga-Jamuna Press, 2001.
- Peter H. Dana: Geodetic Datum Overview - Large amount of technical information and discussion.
- UK Ordnance Survey
- US National Geodetic Survey
- Borkowski, Kazimierz (1987), "Transformation of Geocentric to Geodetic Coordinates Without Approximations", Astrophysics and Space Science 139: 1–4, doi:, http://articles.adsabs.harvard.edu/full/1987Ap%26SS.139....1B

